计算机组成
1.电子计算机与存储程序控制
冯·诺依曼计算机
特点:储存程序、顺序执行。
内容:
- 计算机(指硬件)应由运算器、存储器、控制器、输入设备和输出设备5大基本不见组成。
- 计算机内部采用二进制来表示指令和数据。
- 将编写好的程序和原始数据事先存入存储器中盘那个,然后再启动计算机工作,这就是存储程序的基本含义。
贡献:提出和实现“存储程序控制”的概念。
2.计算机的硬件组成
计算机硬件层级结构
中央处理器(CPU) = 控制器(CU) + 算术逻辑单元,运算器(ALU) + 寄存器(Register)
主机 = 中央处理器 + 主存储器
外部设备 : 除去主机以外的硬件装置(如输入设备、输出设备、辅助存储器等)

计算机的主要部件
1.输入设备:输入设备的任务是把人们编好的程序和原始数据送到计算机中去,并且将它们转换成计算机内部所能识别和接受的信息方式。
2.输出设备:输出设备的任务是将计算机的处理结果以人或其他设备所能接受的形式送出计算机。
3.存储器:存储器是用来存放程序和数据的部件,它是一个记忆装置,也是计算机能够实现“存储程序控制”的基础。在计算机系统中,规模较大的存储器往往分成若干级,称为存储系统。
三级存储系统:高速缓冲存储器<——>主存储器<——>辅助存储器
4.运算器:运算器是对信息进行处理和运算的部件,经常进行的运算是算术运算和逻辑运算,因此运算器的核心是算术逻辑运算部件ALU。
5.控制器:控制器是整个计算机的指挥中心它的,主要功能是按照人们预先确定的操作步骤,控制整个计算机的各部件有条不紊地自动工作。
计算机各大部件之间连接
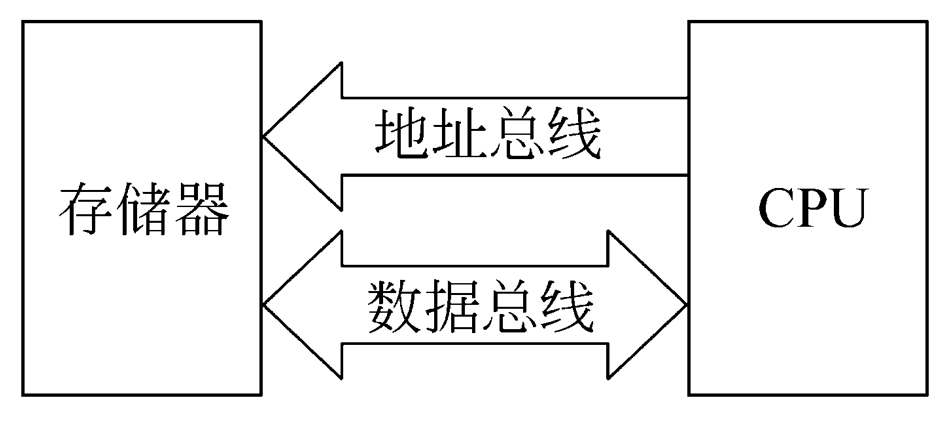
1.总线结构(小、微型机)
总线是一组能为多个部件服务的公共信息传送线路,它能分时地发送与接收各部件的信息。
2.大、中型计算机的典型结构
设计目标更着重于系统功能的扩大与效率的提高。分为四级:主机、通道、设备控制器、外部设备。
1.2.3冯·诺依曼结构和哈佛结构的存储器设计思想
1.冯·诺依曼结构
指令和数据是不加区别地混合存储在同一个存储器中的,共享数据总线。指令地址和数据地址指向同一个存储器的不同物理位置,指令和数据的宽度相同。由于指令和数据存放在统一存储器中,不能同时取指令和操作数(影响高速计算和系统性能的“瓶颈”)。
2.哈佛结构
指令和数据是完全分开的,存储器分为两部分,一个是程序存储器,用来存放指令,另一个是数据存储器,用来存放数据。这意味着在一个机器期内可以同时准备好指令和操作数,本条指令执行时可以预先读取下一条指令,所以哈佛结构的中央处理器通常具有较高的执行效率。

3.计算机系统
一个完整的计算机系统包含硬件系统和软件系统两大部分。硬件通常是指一切看得见,摸得到的设备实体;软件通常是泛指各类程序和文件,它们实际上是由一些算法以及其在计算机中的表示所构成的。
硬件与软件的关系
在计算机系统中没有一条明确的硬件与软件的分界线。硬件和软件之间的界面是浮动的,对于程序设计人员来说,硬件和软件在逻辑上是等价的。
固件是指那些存储在能永久保存信息的器件(如ROM)中的程序,是具有软件功能的硬件。固件的性能指标介于硬件与软件之间,吸收了软、硬件各自的优点,其执行速度快于软件,灵活性优于硬件,是软、硬件结合的产物。
系列机和软件兼容
系列机是指一个厂家生产的,具有相同的系统结构,但具有不同组成和实现的一系列不同型号的机器。 系列机的软件兼容分为向上兼容、向下兼容、向前兼容和向后兼容4种。向上(下)兼容指的是按某档次机器编制的程序,不加修改就能运行在比它更高(低)档的机器上;向前(后)兼容是指按某个时期投入市场的某种型号机器编制的程序,不加修改就能运行在它之前(后)投入市场的机器上。
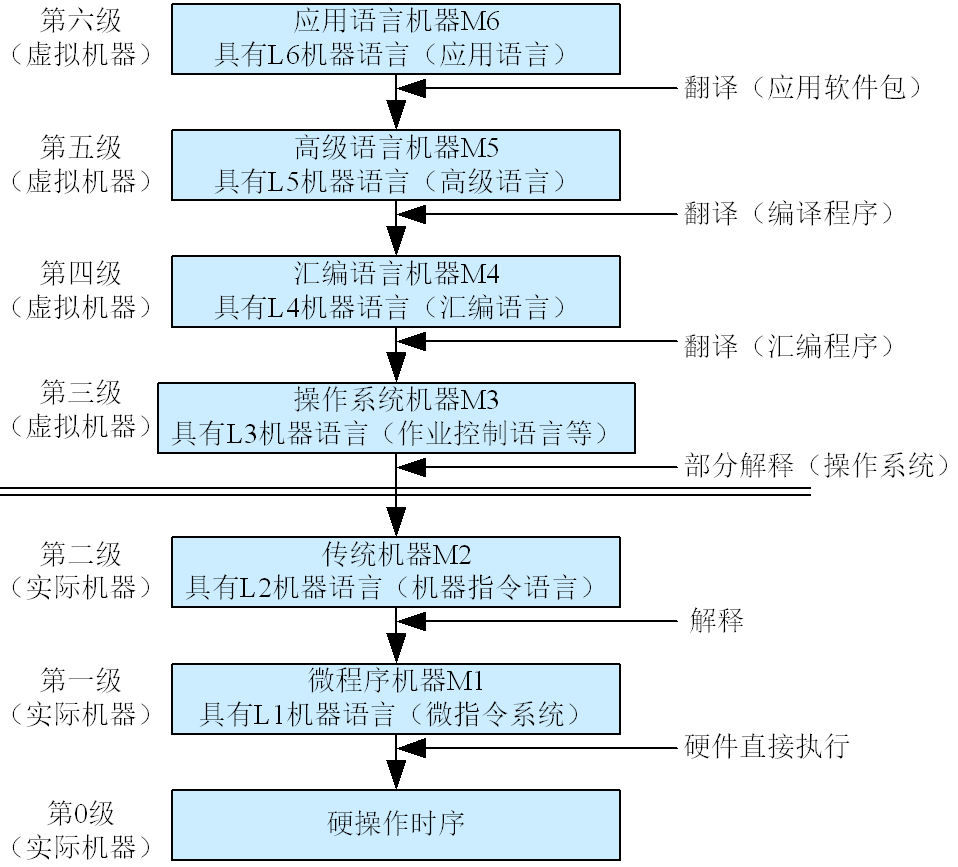
计算机系统的多层次结构
现代计算机系统是一个硬件与软件组成的综合体,可以把它看成是按功能划分的多级层次结构。
4.计算机的工作过程和主要性能指标
工作过程
例:计算a + b - c
步骤:
1.执行取数指令,从主存单元取出数a,送入累加寄存器中。
2.执行加法指令,将累加寄存器中的内容a与从主存单元取出的数b一起送到ALU中相加,结果a+b保留在累加寄存器中。
3.执行减法指令,将累加寄存器中的内容a+b与从主存单元取出的数c一起送到ALU中相减,结果a+b-c保留在累加寄存器中。
4.执行存数指令,把累加寄存器的内容与a+b-c存至主存单元。
5.执行停机指令,计算机停止工作。
性能指标
1.机器字长
参与运算的数的基本位数,一般等于内部寄存器的大小。
2.数据通路宽度
数据总线一次所能并行传送信息的位数。
3.主存容量
一个主存储器所能存储的全部信息量。
4.运算速度
(1)吞吐量:系统在单位时间内处理请求的数量。
(2)响应时间:系统对请求作出响应的时间,包括CPU时间(运行一个程序所花费的时间)、等待时间(用于磁盘访问、存储器访问、I/O操作、操作系统开销等时间)。
(3)CPU主频和时钟周期:主频即时钟频率,表示CPU内数字脉冲信号震荡的速度,时钟周期即主频的倒数,这是CPU中最小的时间元素,每个动作至少需要1个时钟周期。
(4)CPI(Cycles per Instruction):每条指令执行所用的时钟周期数,由于并行化,一个时钟周期内可以处理若干指令,故出现IPC指标。
(5)IPC:每个时钟周期执行的指令数。
(6)CPU执行时间:执行时间 = CPU时钟周期数 / 时钟频率 = 指令数 * CPI / 时钟频率。
(7)MIPS(Million Instructions per Second):每秒执行多少百万条指令。对于一个给定程序,MIPS = 指令数 / (执行时间 * 10^6) = 主频 / CPI = 主频 *IPC。
(8)MFLOPS(Million Floating-point Operations per Second):每秒执行多少百万次浮点运算,适用于衡量向量机的性能。对于一个给定程序,MFLOPS = 浮点操作次数 / (执行时间 * 10^6)。